
AI systems capable of gaming with humans have significantly evolved and are now widely used by numerousame creators globally. The majority of these systems are engineered for online competition against humans, typically on digital platforms and virtual spaces, rather than in a physical, real-world setting.
"Recent advancements in AI have sped up the evolution of versatile robot designs," Renchi Zhang, Joost de Winter, and their colleagues wrote in their paper. "Chess provides a standardized environment that allows for the evaluation of the influence of robot behaviors on human behavior. This article presents an open-source chess robot for human–robot interaction (HRI) research, specifically focusing on verbal and non-verbal interactions."
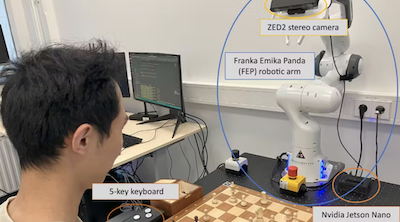
The robotic system created by the researchers comprises both hardware and software elements. The physical components of the robot consist of a Franka Emika Panda robotic arm with seven degrees of freedom, a Franka robotic hand, a tailor-made 3D-printed robotic gripper, a ZED2 StereoLabs camera, a keyboard, an external microphone and speaker linked to a computer, an NVIDIA Jetson Nano computer, and a PC.
The robot is also supported by various software modules, such as perception, analysis and evaluation, motion planning and execution, and interaction. The perception module interprets images of the chessboard taken by the ZED2 camera and converts them into textual descriptions.
Zhang, de Winter, and their team assessed their robotic system's capability to play chess against humans through a set of preliminary tests. Although the user's perception of interacting with the robot has not been investigated yet, they discovered that the robot was proficient in strategizing its upcoming chess moves and relocating the pieces to the intended positions on the board.
The robot's underlying code and the datasets used to train its classifiers are open-source and can be accessed on GitHub.